
Effects of Feedback of Fingertip Force Information with Temporal Coded Vibration Stimulation on Precision Grasping Tasks
Abstract
Tactile information plays an important role in human manipulation of objects; however, prosthetic limb placement or teleoperation requires the manipulation of alternative bodies in the absence of tactile sensations. To provide an alternative to tactile sensation, this study proposes and assesses a continuous feedback scheme with temporally coded vibration. This scheme was designed to provide discrete intended tactile information in response to changing object-controlled situations by repetitively presenting time-coded vibration patterns. The effects of the proposed scheme on an object with acatch-and-hold task in virtual reality were confirmed. Compared to the control feedback scheme that provides vibration only when the balance of the virtual grip force and object position is changed, the proposed feedback scheme has a better effect in terms of the success rate of holding on to the object with an appropriate holding force during the task. The effect is larger, especially in the invisible task condition, suggesting that the increased amount of information with coded vibration patterns can be used without any special training, especially without visual information. Considering the existing studies that show the effect of a feedback scheme in response to motion events, the continuous feedback scheme proposed in this study may be more suitable for movements that require sequential coordination and passive responses than stimulation methods based on motion events. This feedback scheme has potential applications not only in tele-technology but also in healthcare, such as rehabilitation.
Author Contributions
Copyright © 2022 Tomoya Hayashi, et al.
 This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Competing interests
The authors have declared that no competing interests exist.
Citation:
Introduction
Feedback information from motion is important for controlling and learning physical tasks. Without error information between the intended and actual motions, we cannot obtain a clue to correct the next motion 1, 2. Tactile information is known to act as feedback for adjusting motion control and learning behavior 3, 4, and 5. Recently, movable prosthetic limbs, virtual reality systems, and teleoperation of robots have required users to operate their alternative bodies without tactile feedback 6, 7, and 8. In another case, patients with sensory paralysis lacked tactile feedback from their limbs even though their motor functions were normal 9, 10. These cases force people to rely on small visual or auditory signals to understand the situation.
Artificial tactile feedback is expected to play a complementary role to the information obtained from natural tactile sensations. Among the various possible artificial tactile feedbacks, vibration stimulation has the capabilities of compactness, ease of maintenance, and recognizability. Vibration stimulation comprises several variables, such as amplitude and frequency, and feedback schemes have been proposed that directly link these variables to target tactile information or the magnitude of the force 11, 12, and 13. However, because human tactile sensitivity is affected by vibration variables14, 15, and 16, as well as by the wearing condition of the vibration device and the adapting, the information feedback using the variables raises concerns about robustness.
As a remedy for unreliability, several feedback methods have been proposed with conversion and discretization, such as changing the stimulation position 17, 18, and 19 and timing corresponding to motion events that include touch, lift-up, and break 20, 21. The methods that notify users only when a motion event occurs have been confirmed to be sufficiently effective for simple single-operation tasks 20, 21, and 22; however, it is questionable whether the amount of feedback information is sufficient in an environment that requires continuous passive responses to motion events, such as when the interaction with objects is dynamic.
Therefore, in this study, we propose a continuous vibration coding scheme as a novel tactile feedback method that increases the amount of feedback information and assesses its effect with a catch-and-hold task that requires fine-tuning and holding for several seconds in a virtual environment. By setting up vibration temporal patterns that correspond discretely to the target tactile information, we expect that this scheme can ensure the reliability of information transfer through stimulation while preserving the amount of information.
Method
Participants
Twelve right-handed males, with an age of 24.1 ± 2.28 (mean ± std), participated in the experiment. Each participant had no experience with the combination of vibration stimulation used in this study and only became proficient after being presented with it in the explanation.
The experimental protocols using the haptic device were approved by the Ethics Committee of the Toky Institute of Technology, Japan. All participants were briefed about the experiment and signed a consent form before the experiment.
Equipment
The picture at the bottom left in Figure 1(A) shows the experimental setup during the experiment. The monitor placed 50 cm in front of the participant shows a virtual world containing two gray cursors corresponding to the positions of the fingertips (i.e., thumb and index fingers), a rectangular object to be held, and the floor Figure 1(A). The cursors (gray squares) were manipulated with the right thumb and index fingers, and their spatial positions were measured using SPIDAR-G 23, 24, and 25. SPIDAR-G can even measure three-dimensional positions that would be shadowed in optical measurement methods, and its haptic feedback function was not used in this study.
The vibration stimulations were provided to the participants by a DC transducer (FM34F, Tokyo Parts Industrial Co.) attached to the right upper arm and controlled by a microcomputer (Arduino Uno R3, Arduino). The microcomputer received serial signals from a PC simulating the virtual world and generated a fixed voltage.
Tasks
Figure 1(A) shows the task status flow. When a trial starts, the floor begins to fall out by 0.5 s at 0.33 m/s. The virtual object would begin to fall to the floor at 0.67 m/s2 from the same time the floor starts falling. If nothing interferes with the object falling, the object lands after 0.7 s. The participants were instructed to catch and hold the virtual object while avoiding object landing using their right thumb and index fingers. The force
Figure 1.Experiment overview. (A) Task status flow. Participants were asked to catch the falling object and hold it for 7 seconds. They could control the virtual thumb and index fingers (gray small squares) by moving their fingers and could increase the holding force by decreasing the distance between the two fingertips. Four holding states, not hold (I), weak hold (II), stable hold (III), and overpowered (IV), could transit each other depending on the virtual force. The object became transparent in the invisible condition as shown in the right lower panel. The results, Success, or Unsuccess, were not fed back to the participants when a trial finished at Success or Unsuccess. When a trial finished as Fail with an object drop, the trial ended before 7 seconds had passed and the next trial started. The picture in the left low panel is a task scene. A paper partition prevented the participants from looking at their hands. (B) Task process. The experiment had eight runs which include four blocks. Each block, assigned with one of the four vibration conditions, included five trials with each weight setting, light and heavy, respectively. The total amount of trials was three hundred twenty. The visibility conditions changed every two runs. (C) Stimulation patterns of the four vibration conditions. The vibration in single and single-coded conditions was generated one time when the holding state changed. The vibration in continuous-coded conditions keeps stimulating the participants during a trial.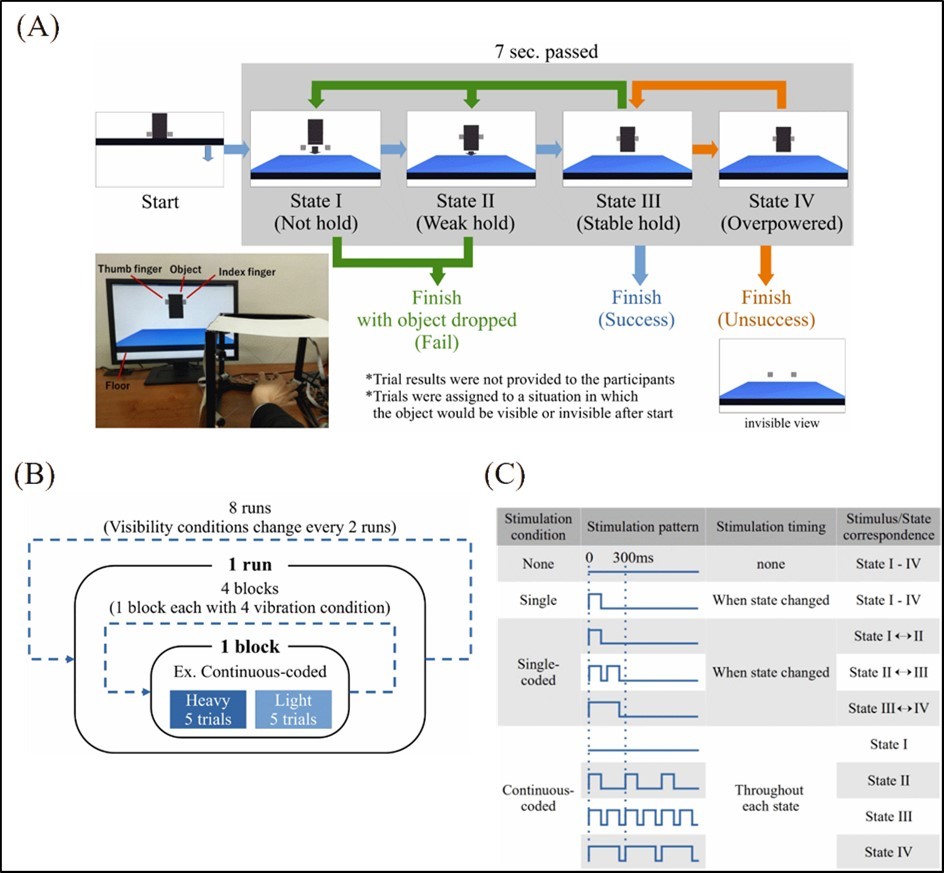
required to hold the object was calculated according to the distance between the two fingertips, as described in Section 2.4.1. One trial finished when the object landed on the floor or 7 s had passed, the participants were provided with single or multiple vibration stimulation during trials to notify the holding status I, II, III, and IV, as shown in Figure 1(A). The detailed vibration conditions are described in Section 2.4.2.
To evaluate the effect of vibration stimulation while avoiding the learning effect of the optimal fingertip distance, we changed the visibility and weights of the object. In the invisible condition, the object was not shown on the screen, and the participants had to perform the task simply by changing their fingertip positions. For the weight condition, light and heavy objects were utilized to ensure that the fingertip distance for the optimal force was not always the same, as described in Section 2.4.4. Weight settings were intended to interfere with the learning effect and were not considered important in the analysis. Therefore, in total, three types of environmental factors were provided: vibration (i.e., four conditions, as described in 2.4.2), visibility (i.e., visible or invisible), and weight (i.e., light or heavy), which means there were 16 combinations (i.e., four vibration conditions X two visibility conditions X two weights). Each combination was performed in 20 trials each, for a total of 320 trials by a participant.
As shown in Figure 1(B), one block consisted of ten trials, five blocks each for light and heavy objects in a randomized order, and four blocks were repeated by changing the vibration condition in a randomized order, resulting in one run. The visibility conditions were changed every two runs starting with the visible condition, and the conditions of the remaining three sets of two runs were randomly selected from one visible and two invisible conditions. For the order of the trials, we referred to the method in a previous study 26.
Condition Settings
Force Calculation from Fingertip Positions
The force to hold the object was designed to be controlled by two fingers, based on the work used in a previous study 26. Specifically, the participants performed the task without any physical haptic or tactile feedback to hold the virtual object. The two virtual fingers on the monitor were controlled by opening and closing the thumb and index fingers. Once the virtual fingers touched the object, the holding force was set to increase as the distance between the thumb and index fingers decreased. To help participants maintain an appropriate force to hold the object, the shape of the object was designed to be slightly dented if the calculated force was too strong. Specifically, the maximum amount of denting, that is, one-twenty-fourth of the width on each side of the object, occurs when the virtual holding force is stronger than 24 N.
The virtual holding force calculated using Equation (1) determines the vibration pattern used for the force information feedback. Equation (1) included initial values, which were randomly determined from a uniform distribution in the range of –0.01 to 0.01 m on each trial to prevent learning.
where Fh is the virtual holding force (N),is the length (m) between the thumb and index fingers, and Lthumb-index is the initial value of the length (m) randomized by each trial.
Each trial ends when the object landed on the floor (i.e., Fail, the green pathway case in Figure 1(A) or 7 s elapsed without falling (i.e., success or unsuccess, the blue or orange pathway case), and the next trial starts one second later. Before starting the trial, a dark screen was displayed for 1.5 to 3.5 s. The duration wa determined randomly with a uniform distribution.
There were four holding states: “Not hold,” “Weak hold,” “Stable hold,” and “Overpowered”, and each state corresponds to State I to IV in Figure 1 (A). In a weak-hold state, the object slips off its fingertips by slowing down its fall speed according to the holding force. However, in a stable-hold or overpowered state, the object does not fall. The speed of falling is visualized as the length of the arrow in the images of Start and States I and II in Figure 1 (A). Based on Equation (2), the holding state was determined by the force applied to the object. The assignment of each state was affected by the weight setting described in detail in Section 2.4.4,
where Fhis the holding force (N), Flower is the required holding force calculated by Equation (3), and Fupper is calculated by Equation (4) and is the criterion for the limit of a stable hold for the object. Flower and Fupper are decided based on the weight setting.
Based on Equation (3), the holding force required for a stable hold varies during the task. This was intentionally designed to replicate situations that require continuous precise control, such as holding a cup into which water is continually poured.
where α is the factor calculated from the friction coefficient and weight conversion (N/kgf), which is 32.7, is the object weight (kg) set as 0.2 at light and 0.5 at heavy, and is the task time (s).
Vibration Conditions
Four vibration conditions were evaluated: none, single, single-coded, and continuous-coded Figure 1 (C). Vibration stimulation was presented only when the holding state shifted in the single- and single-coded conditions, whereas the stimulation was repeatedly presented during the trials in the continuous-coded condition. No vibration stimulation was provided under the none condition. In the single-coded condition, one of the three vibration patterns (activate a vibrator for 150 ms, two times for 100 ms with 50 ms rest, and for 250 ms) was presented depending on the holding state shifts. The single condition used only one short vibration (activated for 150 ms) regardless of the difference in the holding state shifts. On the other hand, in the continuous-coded condition, one of the three vibration patterns (activated for 100 ms, two times for 100 ms with 50 ms rest, and for 250 ms) occurred repeatedly every 300 ms, depending on the holding states.
After explaining each vibration pattern to the participants before the start of the experiment, they were asked to indicate which vibration pattern was presented at random, and the process was repeated until the percentage of correct answers exceeded 90 % for the last 20 times to ensure comprehension.
Visibility Conditions
When comparing the effects of the four vibration conditions, visibility conditions were also evaluated with or without visual feedback. In the visible condition, not only was the object visible but it was also visually dented in response to the force applied to the object, allowing the magnitude of the force to be visually confirmed. On the other hand, in the invisible condition, the object became transparent after the task started, and the participant could not obtain visual information about the force.
Weight Conditions
The weight settings were set to prevent learning of the optimal holding force and to prevent working only with feedforward control. The initial distance between the virtual fingers was designed for the same purpose, but the weight settings were introduced as a factor that was more clearly influenced by the goal. The virtual objects were assigned a weight of either light or heavy. The object that could be held by a weak holding force was assigned a light setting, while the object requiring a strong holding force was assigned a heavy setting. The weight settings were not disclosed to the participants, and they were required to control them carefully after the start of the trial. The appearance of the object is the same, and the state that comes first is random.
Analysis
The behavior of each participant during the task was recorded as the virtual force and the holding state. The time and type of vibrations were recorded. The trials were considered frail if the object landed on the floor. In Success trials, the object was kept in hold in a trial period without an “overpowered” state. Except for these trials, the other trials were defined as Unsuccess trials, without object drop but elapsed “overpowered” state. Performances of each condition were evaluated by each rate and total periods of “stable hold” state in tasks except for Fail trials. The analysis of performances used two-way repeated analyses of variance (ANOVA) and the Holm method 27 as a post-hoc test with MATLAB 2022a
Results
Figure 2 shows the results for Success Figure 2 (A), Fail Figure 2 (B), and Unsuccess Figure 2 (C) rates as performances. An ANOVA was conducted for each rate to ascertain which feedback contributed to task performance. The results Figure 2 (A) showed no significant interaction for the success rate (F = 1.34, p > .05), and the main effects were found for the vibration (F = 9.17, p <.001) and visibility (F = 124, p <.001) conditions. The post-hoc tests indicated that the success rate was significantly higher in the continuous-coded condition than in the other three conditions and that the success rate was significantly higher in the visible condition. However, a significant interaction was found for the FAIL rate (F = 3.61, p < .05) Figure 2 (B). The post-hoc test indicated significant differences between the visible and invisible conditions for each vibration condition (p < .01), but no significant differences were found between the vibration conditions for both visible and invisible conditions (p > .05), although continuous-coded conditions showed a relatively low failure rate. The results of the unsuccess rate showed no significant interaction (F = 0.45, p > .05) Figure 2(C), and the main effects were found for the vibration condition (F = 3.65, p < .05) but not for the visibility condition (F = 2.17, p > .05). The post-hoc test indicated that the unsuccess rate for continuous-coded was significantly lower than that for single-coded (p < .01).
Next, we investigated the trajectories of the holding force to determine whether the continuous-coded condition had an effect on maintaining a stable holding during the trials. Figure 3 (A) shows examples of the trajectories of one participant for each object’s weight in the invisible condition. With the continuous-coded vibration (red lines), the holding force initially fluctuated and later remained within a “stable hold” range (blue ranges). The total time at “stable hold” for trials other than failed trials was extracted as an index of control precision and is compared in Figure 3 (B). The continuous-coded group showed the longest “stable hold” time, and ANOVA showed a significant interaction (F = 5.55, p < .01). The post-hoc test showed that the time for the continuous-coded condition was significantly longer than for the no condition, regardless of visibility conditions (p < .01). The time for the continuous-coded condition was also longer than for the single-coded in the visible condition (p < .01). In addition, the duration of the single-coded condition was significantly longer than that of the no condition in the invisible condition (p < .05). The time in the visible condition was significantly longer than that in the invisible condition for all vibration conditions (p < .01).
To examine the reason why total “stable hold” time increased with the continue-coded, we additionally calculated the rate of returning to a “stable hold” state after transitions from “stable hold” to “overpowered” or “weak hold” (Figure 4). For the return rate from “overpowered” Figure 4(A), no significant interaction was indicated (F = 1.12, p > .05) and both main effects of vibration (F = 11.2, p < .001) and visibility (F = 10.2, p < .01) were confirmed. As a result of the post-hoc test, the continue-coded condition had a significantly high returning rate from “overpowered” than that in the none condition (p < .01), and the visible condition had a significantly higher rate than the invisible condition (p < .01). For the return rate from “weak hold” Figure 4 (B), a significant interaction was found (F = 8.06, p< .001). Although there was no difference in the visible condition, the rate from the “weak hold” of the none condition was significantly lower than that of the continuous-coded condition (p < .01) and the single condition (p < .001) in the invisible condition. For each vibration condition, the rate from the “weak hold” in the visible condition was significantly higher than in the invisible condition (p < .01).
Figure 2.Comparisons of each performance rate. (A) Success rate. (B) Fail rate. (C) Unsuccess rate. The blue and orange bars indicate the performance of each vibration condition including both visible and invisible cases at success rate (A) and unsuccess rate (C), respectively, because Success and Unsuccess rates showed no significant interaction (F = 1.34, p > .05 for success rate, F = 0.45, p > .05 for unsuccess rate). At fail rate (B), filled and vacant bars represent the performance in visible and invisible conditions, respectively. Significant differences are marked only for those between the vibration conditions.
Figure 3.Comparisons focusing on holding force trajectories and total "stable hold” time. (A) Examples of holding force trajectories. The left graph shows the trajectories with a light object, and the right graph shows those with a heavy object. The black solid, dotted, dashed, and red solid lines represent force transitions in the none, single, single-coded, and continuous-coded conditions, respectively. (B) Total time in “stable hold”. The filled and vacant bars represent the time in visible and invisible conditions, respectively. Significant differences are marked only for those between the vibration conditions.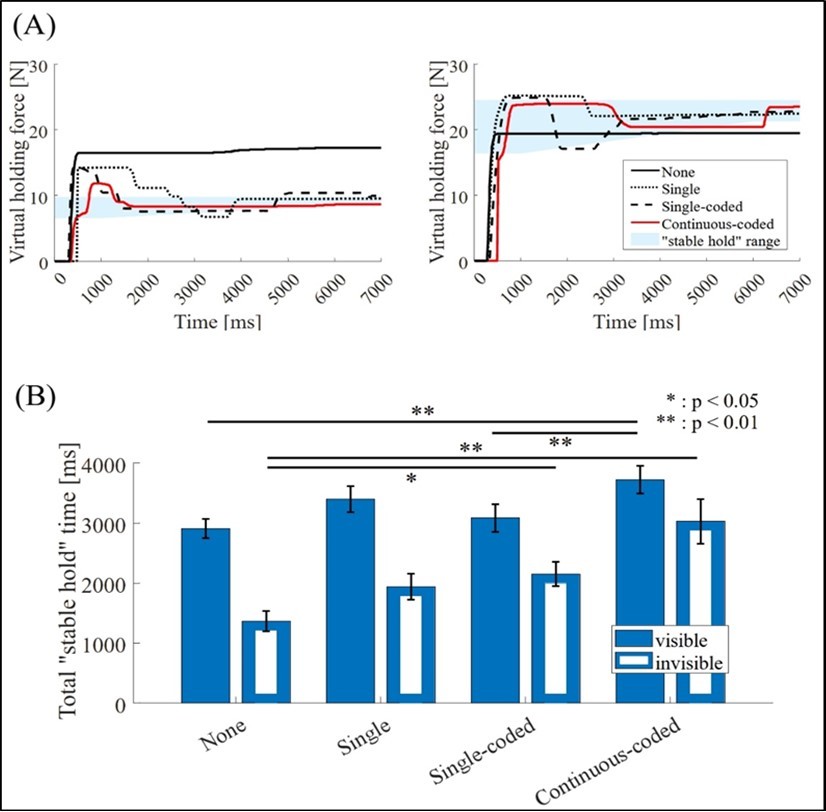
Figure 4.Return rates to “stable hold”. (A) Return rate from “overpowered”. The bars indicate the rate of each vibration condition, including the rate of both visible and invisible, as ANOVA did not show an interaction effect (F = 1.12, p > .05). (B) Return rate from “weak hold”. The filled and vacant bars represent the performance in visible and invisible conditions, respectively. Significant differences are marked only for those between the vibration conditions.
Discussion
In this study, we demonstrated that the proposed tactile feedback scheme based on continuous-coded vibration stimulation had an enhanced effect on catch-and-hold object task performance in a VR environment. The success rate of the task was significantly higher in the continuous-coded condition than in other conditions. However, the Fail (i.e., insufficient force) and Unsuccess (i.e., excessive force) rates did not show significant differences. The results indicate that the type of vibration stimulation affects the fine-tuning of holding force.
Looking at the force shift during the trial in more detail as shown in Figure 3 (A), the continuous-coded condition showed superior performance for total “stable hold” time than that for the none and single-coded conditions. In addition, the force was more stable in the stable-hold range under the continuous-coded condition. Therefore, it is considered that the continuous-coded vibration method can assist in quick adjustment to the appropriate state and assist in fine-tuning even within the same state to avoid shifting the state. The return rates to the “stable hold” from other statuses (weak-hold and overpowered) also showed the superiority of the continuous-coded condition, supporting the concrete effect of the proposed method in fine-tuning holding even under invisible conditions. The fact that single- and single-coded conditions did not have as positive an effect as a continuous-coded condition suggests that repeated stimulation made participants less likely to miss the information presented by the vibration and more likely to keep track of their own holding state. In feedback control, it is important to ensure the robustness of the information to determine the direction of correction. On the other hand, considering the requirements of Success not being an “overpowered” state, the stimulation method does not only affect the immediate recovery of the state but also the avoidance of state transitions before they occurred. It is possible that the continuous-coded vibration affected th feedforward coordination in the prediction of the initial response and adjustment amount.
The single condition that is based on the event-related method, for which performance improvements have been reported 20, 21, and 22, had only limited positive effects, with only a return rate from “weak hold” in the invisible condition. In our study, the task was longer and more complex than in previous studies. The differences in the tasks may have affected the attenuation of the support effect for controlling the holding force. Another study also reported a result in which the stimulation method based on the contact event had no significant effect in a task longer than five seconds, but the study reported no significant slip prevention effect when the method did not provide stimulation with an object slipped 28. The positive effect of a return rate from “weak hold” in an invisible condition with a single condition compared to a none condition Figure 4 (B) indicates that the single stimulation method allows for dealing with the particular situations to be avoided even if the task time is longer when slip events are also notified. On the other hand, the other performances, including the return rate from the “overpowered” state, did not show a pronounced effect of the single condition. The transition to “weak hold” and “overpowered,” in which the same stimulus was presented with a single condition, was difficult to distinguish in the invisible condition. As a result, it is considered that a movement toward recovery from “weak hold,” which leads to a critical situation of the object falling, was preferentially induced. This suggests that a simple feedback method, such as a single condition, may not be sufficiently effective for complex movements in which simple feedback and responses cannot be handled.
The single-coded condition added the information by vibration patterns to the single condition but did not show improved assistive effects compared to the single condition, contrary to our expectation. However, the condition showed a significant effect on the total “stable hold” time Figure 3 (B), a more fundamental index, in an invisible situation compared to the no condition. The increase in the total time of the optimal state despite the lack of a clear effect on either immediate correction or advance prediction of control suggests that the single-coded method promotes fine-tuning to prevent state transitions within the same state. Because this role is also observed for the continuous-coded condition, it is considered to be an effect of the stimulation coding method. However, the effect of the single-coded condition is limited to an invisible situation, perhaps because the complexity of the stimulus and low presentation probability result in less reliability for the vibrating stimulus, and the effect Is lost in a visible environment where multiple information presentations are mixed.
In summary, we found that the feedback method with continuous-coded vibration was effective for manipulation in tasks that were not completed by feedforward control. The method of coded vibration stimulation assisted in fine-tuning the manipulation by support in state awareness, and the addition of continuous stimulation to this ensured the robustness of feedback information. The results support both hypotheses of the assist effect of the increased information content of the stimulus and the certainty effect of the continuous stimulation; however, they also indicate that the increased information content does not function well on its own.
Conclusion
This study examined whether the conversion of innate haptic information into an artificial stimulation of vibration, especially when coded, is adequate for motion control. The continuous-coded vibration feedback, that is, the proposed method, worked effectively for complex and time-consuming holding movements. This result is considered to be because of the assistance in understanding the manipulation state by stimulus coding and the robustness of the information provided by the continuous stimulus. However, the control conditions of the feedback method, which showed good effects in previous studies, had only limited effects in our task, suggesting that the appropriate type of feedback stimulus may differ depending on the task. We believe that the present encoded stimulus, which takes 300 ms for single feedback, should be evaluated in the future to determine if it is effective for short-term tasks, such as those in the previous studies. Exploring the characteristics of work tasks and suitable feedback stimulation methods will lead to tools that support rehabilitation and enrich the daily lives of prosthetic hand users and paraplegic patients.
Acknowledgment
This research results were partially obtained from commissioned researches by National Institute of Information and Communications Technology (NICT)-Collaborative Research in Computational Neuroscience (CRCNS) with 21701 and by Japan Science and Technology Agency Moonshot R&D with JPMJMS2012.
References
- 1.Todorov E, Jordan M I. (2002) Optimal feedback control as a theory of motor coordination .Nat Neurosci. 5(11), 1226-1235.
- 2.Scott S H. (2004) Optimal feedback control and the neural basis of volitional motor control Nat Rev Neurosci. 5(7), 532-545.
- 3.Diedrichsen J, Shadmehr R, Ivry R B. (2010) The coordination of movement optimal feedback control and beyond. , Trends Cogn 14(1), 31-39.
- 4.Albert S T, Shadmehr R. (2016) The neural feedback response to error as a teaching signal for the motor learning system. , J Neurosci 36(17), 4832-4845.
- 5.Sigrist R, Rauter G, Marchal-Crespo L, Riener R, Wolf P. (2015) Sonification and haptic feedback in addition to visual feedback enhances complex motor task learning. , Exp Brain Res 233(3), 909-925.
- 6.Iqbal N V, Subramaniam K, Asmi P S. (2018) A review on upper-limb myoelectric prosthetic control. , IETE J Res 64(6), 740-752.
- 7.Dianatfar M, Latokartano J, Lanz M. (2021) Review on existing VR/AR solutions in human–robot collaboration. Procedia CIRP 97, 407-411.
- 8.Kebria P M, Abdi H, Dalvand M M, Khosravi A, Nahavandi S. (2018) Control methods for internet-based teleoperation systems: A review. , IEEE THMS 49(1), 32-46.
- 9.Bolognini N, Russo C, Edwards D J. (2016) The sensory side of post-stroke motor rehabilitation. , Restor Neurol Neurosci 34(4), 571-586.
- 10.Shim J K, Karol S, Kim Y S, Seo N J, Kim Y H. (2012) Tactile feedback plays a critical role in maximum finger force production. , J Biomech 45(3), 415-420.
- 11.Pylatiuk C, Kargov A, Schulz S. (2006) Design and evaluation of a low-cost force feedback system for myoelectric prosthetic hands. , J Prosthet Orthot 18(2), 57-61.
- 12.Cuppone A V, Squeri V, Semprini M, Masja L, Konczak J. (2016) Robot-Assisted Proprioceptive Training with Added Vibro-Tactile Feedback Enhances Somatosensory and Motor Performance. , pLoS One 11(10), 0164511.
- 13.Wilke M A, Hartmann C, Schimpf F, Farina D, Dosen S. (2020) The interaction between feedback type and learning in routine grasping with myoelectric prostheses. , IEEE Trans Haptics 13(3), 645-654.
- 14.Goff G D, Rosner B S, Detre T, Kennard D. (1965) Vibration perception in normal man and medical patients. , J Neurol Neurosurg Psychiat 28(6), 503-509.
- 15.Cipriani C, ’'Alonzo M, Carrozza M C. (2012) A miniature vibrotactile sensory substitution device for multifingered hand prosthetics. , IEEE Trans Biomed Eng 59(2), 400-408.
- 16.Myles K, Binseel M S. (2007) The tactile modality: a review of tactile sensitivity and human tactile interfaces.
- 17.Witteveen H J, Rietman H S, Veltink P H. (2015) Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int. 39(3), 204-12.
- 18.Dietrich C, Walter-Walsh K, Preissler S, Hofmann G O, Witte O W. (2012) Sensory feedback prosthesis reduces phantom limb pain: proof of a principle. , Neurosci Lett 507(2), 97-100.
- 19.Alonzo M, Dosen S, Cipriani C, Farina D. (2014) HyVE-hybrid vibro-electrotactile stimulation-is an efficient approach to multi-channel sensory feedback. , IEEE Trans Haptics 7(2), 181-90.
- 20.Clemente F, Alonzo M, Controzzi M, Edin B B, Cipriani C. (2016) Non-Invasive, Temporally Discrete Feedback of Object Contact and Release Improves Grasp Control of Closed-Loop Myoelectric Transradial Prostheses. , IEEE Trans Neural Syst Rehabil Eng 24(12), 1314-1322.
- 21.Aboseria M, Clemente F, Engels L F, Cipriani C. (2018) Discrete Vibro-Tactile Feedback Prevents Object Slippage in Hand Prostheses More Intuitively Than Other Modalities. , IEEE Trans Neural Syst Rehabil Eng 26(8), 1577-1584.
- 22.Martini E, Cesini I, ’'Abbraccio J, Arnetoli G, Doronzio S. (2021) Increased symmetry of lower-limb amputees walking with concurrent bilateral vibrotactile feedback. , IEEE Trans Neural Syst Rehabil Eng 29, 74-84.
- 23.Sato M, Hirata Y, Kawarada H. (1992) Space interface device for artificial reality-SPIDAR. , Syst Comput Japan 23(12), 44-54.
- 24.Kim S, Hasegawa S, Koike Y, Sato M. (2002) Tension based 7-DOF force feedback device: SPIDAR-G. in Proceedings IEEE Virtual Reality 283-284.
- 25.Aoki Y, Tasaka Y, Odaka J, Yamamoto S, Sato M. (2020) Analysis of Differences in the Manner to Move Object in Real Space and Virtual Space Using Haptic Device for Two Fingers and HMD in HCII. , Cham 12428, 291-301.
- 26.Walker J M, Blank A A, Shewokis P A, O’Malley M K. (2015) Tactile feedback of object slip facilitates virtual object manipulation. 8(4):. 454-466.